 |
|
МЕНЮ
|
Учебное пособие: Теория автоматического управления
Рис.5.2. Переходная характеристика САУ рис.3.1 при входном воздействии Df(t) = 1.0 и различных значениях Koc.
Koc = 1.0
Koc = 10
Koc = 20
Рис.5.3. Переходная характеристика САУ рис.3.1 при входном воздействии DZ = 1.0, Ку = 20 и различных значениях Koc. При подаче воздействия Df(t) = 1.0 (например, включение номинальной нагрузки) управляемая величина x (например, напряжение) мгновенно изменяется на Dx = - 0.4, т. е. уменьшается. При этом x = xо + Dx = 1.0 - 0.4 = 0.6, т. е. при t = 0 и f = 1.0 управляемая величина имеет значение такое же, как при отсутствии управляющего устройства (см. рис.4.1). За счёт действия управляющего устройства (регулятора) после затухания переходного процесса отклонение управляемой величины приобретает значение Dx = - 0.0377. При Кос = 1.0 переходный процесс имеет колебательный характер с большим перерегулированием. При Кос = 10 перерегулирование составляет ½-0.024 - (-0.0377)½ g = --------------------------------------------------- 100% = 36.3% , ½-0.0377½ а время переходного процесса tп = 78с. При Кос = 20 перерегулирование отсутствует, но время переходного процесса увеличивается до tп = 120с (на рис.5.2 не показано). При входном воздействии DZ(t) = 1.0 управляемая величина x = Dx (при xо = 0, Zо = 0 и f(t) = 0) стремится к значению x = 0.906. Причем, характер переходного процесса определяется значением Кос. На основании анализа переходных характеристик рис.5.2 и 5.3 с целью исключения перерегулирования предварительно принимается Кос =20. 6. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ. КАЧЕСТВО ПРОЦЕССА УПРАВЛЕНИЯ Комплексную (амплитудно-фазовую) частотную характеристику (КЧХ, АФХ) W(jw) аналитически легко получить по соответствующей передаточной функции, если положить Р = jw. Путём выделения в выражении КЧХ вещественной U(w) и мнимой V(w) частей, получаются соответственно вещественная (ВЧХ) и мнимая (МЧХ) частотные характеристики U(w) = ReW(jw); V(w) = ImW(jw). Модуль А(w) и аргумент j(w) КЧХ определяют соответственно амплитудную (АЧХ) и фазовую (ФЧХ) частотные характеристики U(w) = modW(jw); V(w) = argW(jw). Между всеми частотными характеристиками имеют место очевидные соотношения: W(jw) = U(w) + jV(w) ; W(jw) = А(w) e jj (w) ; А(w) = ÖU2(w) + V2(w) ; V(w) j(w) = arctg -------------- ; U(w) U(w) = А(w)cosj(w); V(w) = А(w)sinj(w). Применительно к САУ рис.3.1 при входном воздействии Df(t) частотные характеристики приведены на рис.6.1 и 6.2.
Рис.6.1. Комплексная (а), вещественная (б) и мнимая (б) частотные характеристики САУ рис.3.1 при входном воздействии Df(t) и Ку = 20 |

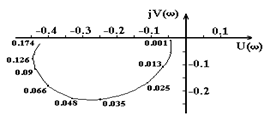 а)
а)  б)
б)
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.