 |
|
МЕНЮ
|
Дипломная работа: Моделирование нагрева асинхронного двигателяПолные потери в меди обмотки статора:
Активное сопротивление фазы обмотки статора:
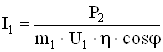
где ρм – удельное сопротивление меди обмотки статора при ожидаемой температуре, Ом∙м; qэл=π(dэл/2)2 – площадь поперечного сечения элементарного проводника, м2. Ток фазы обмотки статора:
где Р2 – мощность на валу двигателя, Вт; η – коэффициент полезного действия, о.е; cosφ – коэффициент мощности; U1 – фазное напряжение, В. 2.4.2 Потери в обмотке ротора Потери в коротозамкнутой обмотке ротора определяются по формуле [13]:
где r2 – активное сопротивление фазы обмотки ротора, Ом; I2 – ток ротора, А. Активное сопротивление фазы обмотки ротора:
где rст – активное сопротивление стержня клетки, Ом; rкл – активное сопротивление короткозамыкающего кольца, Ом; Активное сопротивление стержня клетки:
где ρа – удельное сопротивление алюминия обмотки ротора при ожидаемой температуре, Ом∙м. Активное сопротивление короткозамыкающего кольца:
где Dкл,ср – средний диаметр короткозамыкающего кольца, м; qкл – площадь поперечного сечения короткозамыкающего кольца, м2. Коэффициент приведения тока кольца к току стержня:
где p – количество пар полюсов. Ток в обмотке ротора:
где ki – коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1/I2; νi – коэффициент приведения токов. Коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1/I2:
Коэффициент приведения токов:
где kоб1 – обмоточный коэффициент обмотки статора; kск – коэффициент скоса пазов ротора. 2.4.3 Потери в стали пакета статора При расчете электрических машин потери в стали, определяют через массу стали и удельные потери, которые в свою очередь определяются значением магнитной индукции в стали и частотой питающего напряжения [13,14,15]. Такой способ определения потерь неудобен из-за того, что необходимо знать значение магнитной индукции в сердечнике статора.
где РΣ – суммарная мощность потерь в двигателе, Вт; Рмех – мощность механических потерь, Вт; Рдоб – мощность добавочных потерь, Вт. Суммарная мощность потерь в двигателе:
Мощность механических потерь [13]:
где Кт – коэффициент механических потерь. Коэффициент механических потерь для двигателей с 2 р=2
при 2 р≥4 Кт=1. Мощность добавочных потерь:
3. Реализация тепловой модели асинхронного двигателя в программном пакете Matlab 3.1 Переход к операторной форме Для решения системы дифференциальных уравнений (1.20) на ЭВМ при помощи приложения Simulink, входящего в состав пакета MatLab, представим ее в операторной форме. Следует заметить, что недостатком приложения Simulink является отсутствие задания начальных условий в блоке передаточных функций. Поэтому при преобразовании (1.20) необходимо учесть начальные условия, то есть начальные температуры меди и стали. В системе (1.20) присутствуют превышения температур меди и стали, которые равны:
Подставив (3.1) и (3.2) в (1.20) и раскрыв скобки получим:
Представим систему (7.3) в операторной форме, по правилам преобразования Лапласа:
где θм(0) – начальная температура меди, 0С; θст(0) – начальная температура стали, 0С; Сгруппируем неизвестные θм(р) и θст(р) в левых частях уравнений (3.4), а остальные члены в правых частях:
Представим систему (3.5) в матричной форме:
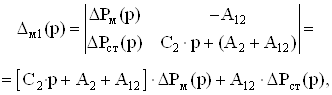
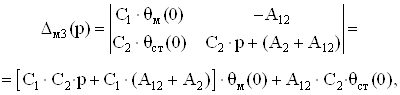
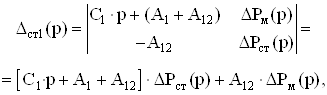
Решим систему (3.6) методом наложения относительно неизвестных θм(р) и θст(р). Решение имеет вид:
где
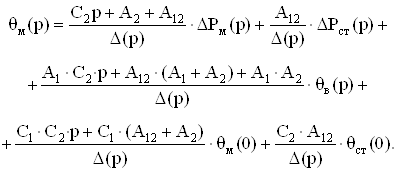
Подставив выражения (3.10), (3.11) и (3.12) в (3.7) получим:
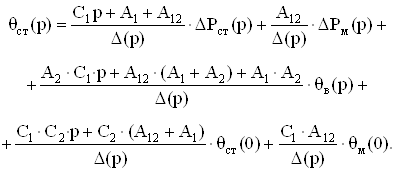
Подставив выражения (3.13), (3.14) и (3.15) в (3.8) получим:
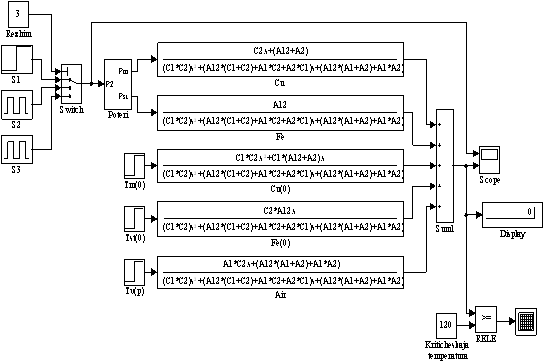
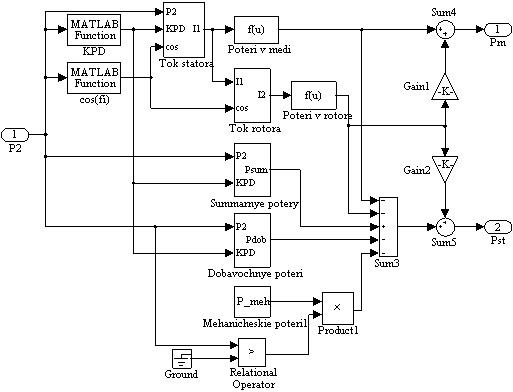
Выражения (3.16) и (3.17) являются окончательным решением для температур меди и стали в операторной форме. Значение Δ в выражениях (3.16) и (3.17) не раскрывается для сокращения записи. 3.2 Синтез структурной схемы тепловой модели асинхронного двигателя По выражениям (3.16) и (3.17) строим структурную схему модели в приложении Simulink. Структурная схема для определения температуры меди приведена на рисунке 3.1. Блоки «S1», «S2» и «S3» моделируют различные режимы нагрузки двигателя. Блок «Switch» служит для выбора одного из режимов «S1», «S2» или «S3». Он управляется источником постоянного воздействия «Rezhim». Блок «Poteri» представляет собой подсистему, рассчитывающую потери в двигателе в зависимости от нагрузки. Блоки «Tm(0)» и «Tst(0)» служат для задания начальных температур меди и стали. Блок «Tv» задает значение температуры окружающего воздуха. В блоки передаточных функций «Cu», «Fe», «Cu(0)», «Fe(0)» и «Air» входят коэффициенты выражения (3.16), отражающие вклад каждой задаваемой величины в нагрев обмотки. С выхода передаточных функций сигналы поступают на сумматор «Sum1». На выходе «Sum1» формируется значение температуры меди, которое поступает на виртуальный осциллограф «Scope», регистрирующий прибор «Display» и элемент сравнения «RELE». Блоки «Kriticheskaja temperatura» и «RELE» моделируют работу теплового реле. Блок «Kriticheskaja temperatura» задает предельное значение температуры обмотки статора. Значение температуры обмотки поступает на элемент сравнения и сравнивается с предельным значением, устанавливаемым ГОСТ 183–74 в соответствии с классом изоляции. Так, например, для изоляции класса В предельное значение температуры обмотки θм=1200 С, для изоляции класса F – θм=1400 С, для изоляции класса H – θм=1650 С. Если значение температуры обмотки больше предельного, то на выходе элемента сравнения появляется сигнал, который отображается на индикаторе. Развернутая структурная схема блока «Poteri» представлена на рисунке 3.2. Она состоит из 20 блоков: «P2», «KPD», «cos(fi)», «Tok statora», «Poteri v medi», «Tok rotora», «Poteri v rotore», «Summarnye poteri», «Dobavochnye poteri», «Mehanicheskie poteri», «Ground», «Relational operator», «Product1», «Sum3», «Sum4», «Sum5», «Gain1», «Gain2», «Pm», «Pst».
Рисунок 3.2 – Развернутая схема подсистемы «Poteri» Поясним назначение каждого из блоков. Блоки «KPD» и «cos(fi)» представляют собой блоки задания функций MatLab, в которых производится кубическая сплайн-интерполяция дискретных значений коэффициента полезного действия η и коэффициента мощности cosφ для определения их величин при произвольном значении нагрузки в интервале 0,25∙Р2 ÷ 1,25∙Р2. В тексте m-файла (см. Приложение А) задаются векторы значений η, cosφ и P2. Дискретные значения η и cosφ берутся из справочных материалов [17]. По этим значениям MatLab строит функцию, состоящую из отрезков кубических полиномов, так, что каждый отрезок проходит через три узловые точки. Результат интерполяции в узловых точках имеет непрерывные первую и вторую производные. Интерполяция реализуется функцией spline (P_2, cosf, P2), где P_2 – идентификатор вектора значений P2, cosf – идентификатор вектора значений коэффициента мощности, Р2 – текущее значение мощности для которого необходимо определить cosφ. На рисунке 3.3 приведен график, полученный сплайн-интерполяцией дискретных значений η, приведенных в таблице 3.1, для двигателя марки 4А132М2У3. Крестиками на графике обозначены узловые точки. Таблица 3.1 – Значения η и cosφ для двигателя марки 4А132М2У3
Аналогично интерполируются значения коэффициента полезного действия. На рисунке 3.4 приведен график, полученный сплайн-интерполяцией дискретных значений cosφ, приведенных в таблице 3.1, для двигателя марки 4А132М2У3. Узловые точки обозначены крестиками.
Рисунок 3.3 – График зависимости η от нагрузки P2, полученный сплайн-интерполяцией Блок «P2» (см. рисунок 3.2) обозначает вход подсистемы, блоки «Pm» и «Pst» – выходы. Блоки «Poteri v medi» и «Poteri v rotore» представляют собой блоки задания алгебраических функций и служат для определения потерь в меди и роторе по выражениям (2.98)
и (2.101)
Блок «Mehanicheskie poteri» представляет собой источник постоянного воздействия с величиной Pмех. Он предназначен для моделирования механических потерь в двигателе. Блоки «Ground», «Relational operator» и «Product1» служат для того, чтобы при отсутствии нагрузки Р2 механические потери Pмех были равны нулю. Величина нагрузки Р2 на элементе сравнения «Relational operator» сравнивается с нулевым значением. Если нагрузка равна нулю, то на выходе элемента сравнения сигнал отсутствует, если не равна нулю, то на выходе элемента сравнения появляется единица. Блок «Product1» перемножает мощность на валу с выходным значением элемента сравнения. При умножении Рмех на единицу на выходе блока «Product1» имеем величину механических потерь. При умножении Рмех на ноль на выходе блока «Product1» сигал равен нулю. Блоки «Gain1» и «Gain2» имеют коэффициент усиления, равный A_rot и B_rot соответственно, и обеспечивают умножение значения потерь в роторе Pрот на коэффициенты, присутствующие в выражениях (2.18)
и (2.19)
Коэффициенты усиления A_rot и B_rot рассчитываются в теле m-файла. Подсистема «Tok statora» рассчитывает значение тока статора по выражению (2.100)
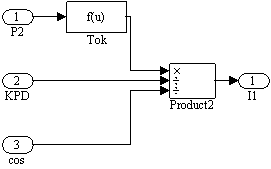
Структурная схема подсистемы приведена на рисунке 3.5. В блоке «Tok» (см. рисунок 3.5) значение мощности на валу P2 делится на фазное напряжение U1 и количество фаз статора m1 в соответствии с выражением (2.100). Блок «Product2» делит полученное промежуточное значение на коэффициент мощности cosφ и коэффициент полезного действия η. В итоге на выходе получаем значение тока статора I1.
Рисунок 3.5 – Структурная схема подсистемы «Tok statora» Подсистема «Tok rotora» (см. рисунок 3.2) рассчитывает значение тока ротора по выражению (2.106)
Структурная схема подсистемы приведена на рисунке 3.6.
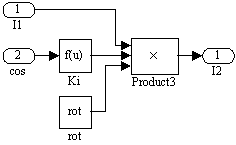
Рисунок 3.6 – Структурная схема подсистемы «Tok rotora» Блок «Ki» (см. рисунок 3.6) представляет собой блок задания алгебраической функции, в котором рассчитывается коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1/I2, по выражению (2.107)
В блоке «Rot» задается величина коэффициента приведения токов νi, рассчитанного в теле m-файла по выражению (2.108)
Блок «Product3» перемножает значения тока статора I1, коэффициента приведения токов νi и коэффициента ki, учитывающего влияние тока намагничивания и сопротивления обмоток на отношение I1/I2. В итоге на выходе имеем значение тока ротора I2. Подсистема «Summarnye poteri» (см. рисунок 3.2) рассчитывает суммарные потери в двигателе по выражению (2.110)
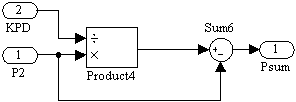
Структурная схема подсистемы приведена на рисунке 3.7.
Рисунок 3.7 – Структурная схема подсистемы «Summarnye poteri» Блок «Product4» делит значение мощности на валу двигателя P2 на коэффициент полезного действия η. На выходе «Product4» получается значение потребляемой из сети мощности P1, из которого в сумматоре «Sum6» вычитается величина мощности на валу двигателя Р2. В итоге на выходе подсистемы имеем значение суммарных потерь в двигателе РΣ. Подсистема «Dobavochnye poteri» рассчитывает величину добавочных потерь в двигателе по выражению (2.113) |
 , (2.99)
, (2.99) , (2.100)
, (2.100) , (2.103)
, (2.103) , (2.104)
, (2.104) , (2.105)
, (2.105) , (2.108)
, (2.108) . (2.110)
. (2.110) , (2.111)
, (2.111) . (2.113)
. (2.113)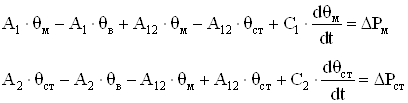 (3.3)
(3.3) (3.4)
(3.4) (3.5)
(3.5) (3.6)
(3.6)

 .
.
 .
. .
.
Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.